


#8: Reaching for heights
Improved gearless hopping, gripping trees with sharp nails, and collecting string data


Welcome back! These past two weeks we’re excited to share some practical progress with mechanism prototypes, testing, and data collection.
Improved gearless hopping
3D printed gears caused a lot of friction, so why not directly drive the leg extension? This worked out really well, and gives us hope that these motors can propel the squirrel from the ground to a reasonable distance up a tree. Even with just one motor instead of two in the previous design, the leg was able to lift its foot about twice as high. After increasing the voltage from 8V to 11V, it could jump on top of two 3D printer boxes:
We found that the length of the string really affected the jump height. Initially, the string was very long, meaning the motor had to twist many revolutions for a leg extension. It did not jump much higher than the previous design with the bevel gear differential. By decreasing the distance from the motor to the crank (effectively pretwisting and decreasing the length of the string), the leg moved much faster and resulted in a much higher jump. With precise timing, the leg can also continuously hop more reliably:

Currently not much energy is being stored elastically during landing, so a jump starting from rest is about the same height as a jump following another. The leg linkage and driving string are really stiff, and does not seem to act like a series spring. With an appropriately sized series spring, the motor would spend more time in its maximum power region1. Additionally, we plan to optimize the linkage to use series elastic power modulation, which is what the inspiration for this project, Salto2, uses to store energy and release it at once to jump much higher than we can. A string with some stretch might work, but intuitively it feels like there would be a lot of frictional loss because the stretch would cause fibers to slide over each other. The next thing we want to try is creating a flexible link using a 3D printed flexure, or putting a dedicated elastic in series with the string. Hopefully, we can create something with minimal hysteresis and friction.
Tree gripping
At the same time, we are developing front legs that can latch onto a tree. From watching squirrels outside and on Youtube, it seems that many quadrupeds climb trees with their front legs sprawled out hugging the trunk, while the back legs tend to be more vertical, close to the body. It’s also interesting that many climbing animals with an alternating gait have a consistent front leg angle of around 10º from the vertical, which results in lower peak lateral forces and lower average angular velocity3. In our prototype, one degree of freedom clamps each leg to the tree, and another guides the hand on a path about 10º from vertical.

We made several grippers of different sizes and stiffnesses inspired by the squirrel foot. The clear part is made of flexible TPU material with three fingers, and three nails are intended to catch itself on bumps and cracks on rough tree bark. There is a tradeoff on stiffness and size: too long or flexible makes the claw bends upwards and slip. Too short or stiff restricts the range of bumps and cracks that can be gripped, making it unreliable.
To reduce the bending, we tried designing in a flexure to act like a parallel linkage (bottom right in the image above). When the nail is pushed back, the finger bends more at specific locations to reduce the rotation at the end. This needs further testing on the tree.
The yellow part at the bottom is latex tubing, intended to bend on impact to grab onto the bark, providing some clamping force between the rubber and the nails to hold the foot in place. However, the latex component does not work as planned. It provides too much normal force that push the nails away from the surface, and it bounces too much when we throw the whole assembly onto a tree.
It seems that the rubber on the back of the foot is not necessary to grip the tree, so we’ll be removing that part for now. The next prototypes will work on making the individual toes more independent so they can grab onto their own surface asperities, and tuning the stiffness so they can grip more consistently while being able to apply the high forces involved in climbing.
Twisted string experiment

To design a linkage transmission that best utilizes the motor and twisted string, we should have a good idea of how the string alters the motor’s motion. When not twisted very much, every twist does not contract the string as much. When near the end of the contraction, each twist makes a much larger difference. We might have to compensate for this changing mechanical advantage in the linkage, or it might be useful because we want a faster foot movement during later parts of the jump.
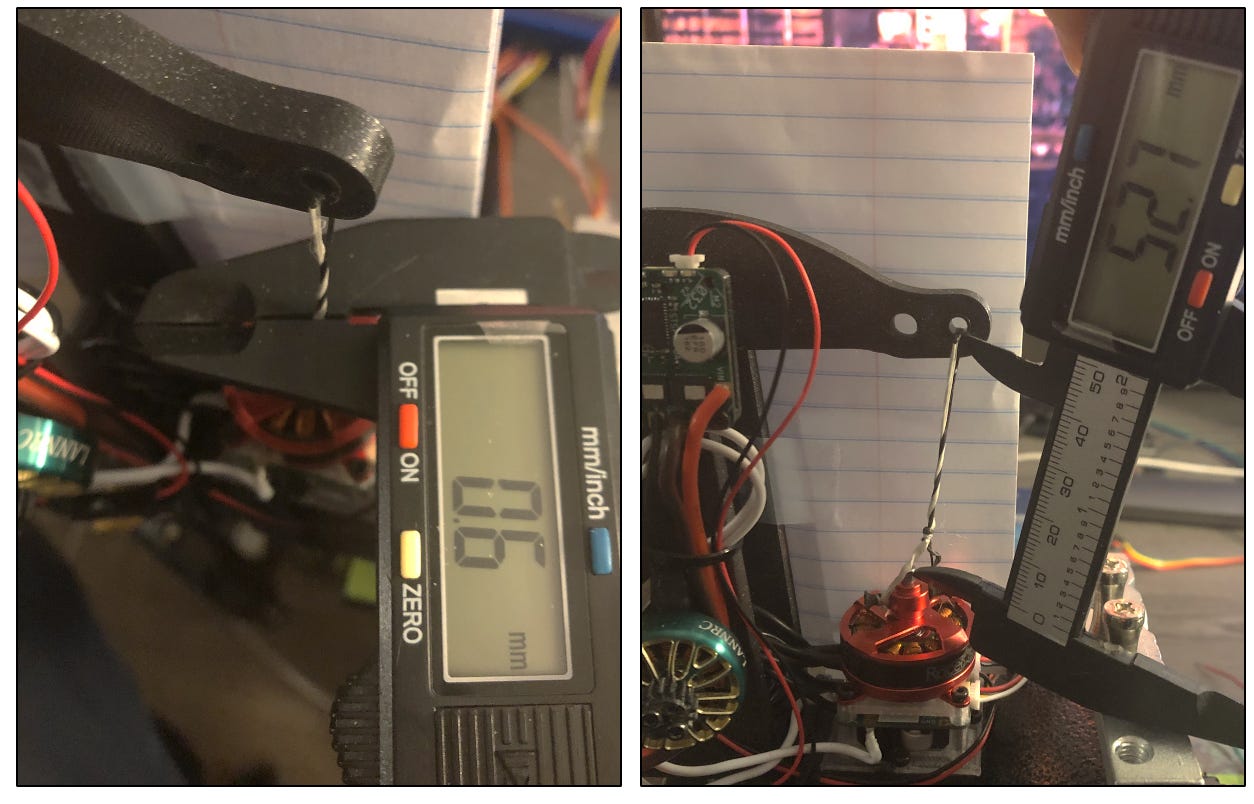
This was our experiment: A motor spins a string that pulls on a seesaw with a weight hanging on the other side. The motor moves in 90º increments, and in between movements the angle of the seesaw is read using the encoder of another motor controller. After knowing the angle and the dimensions of the seesaw, we can solve for the length of the string. To verify the geometry calculations, we also took a video of the experiment and compared the length of the string as tracked in the video (calibrated against the lines on the paper behind the test rig). The video data and processed encoder data matched well except when the string was extremely twisted, likely because the video measurements were referenced from a slightly different point at the end of the motor shaft. To save the time and effort of manually tracking the video, we trust the string length calculations using encoder data.
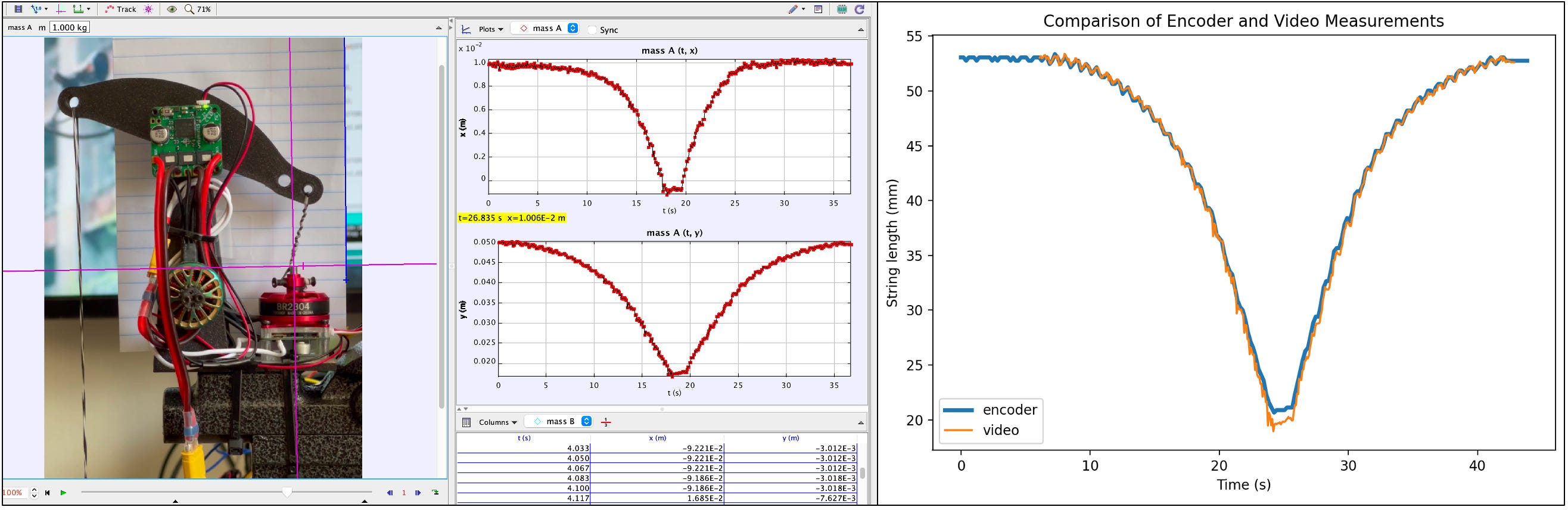
We then did a longer test with 6 twists and untwists, going in both directions. There was a bit of periodic error because an off-center knot on the string moved with the motor rotation, but overall there was a consistent function of motor angle to string length.
The weight on the other end provides some tension, and it seemed like the system was stiff enough that the value of weight itself (200g) didn’t matter very much. Two functions were fitted to the data: a geometrical model of the twisted string actuator4 assuming infinite stiffness, and a 4th-degree polynomial:
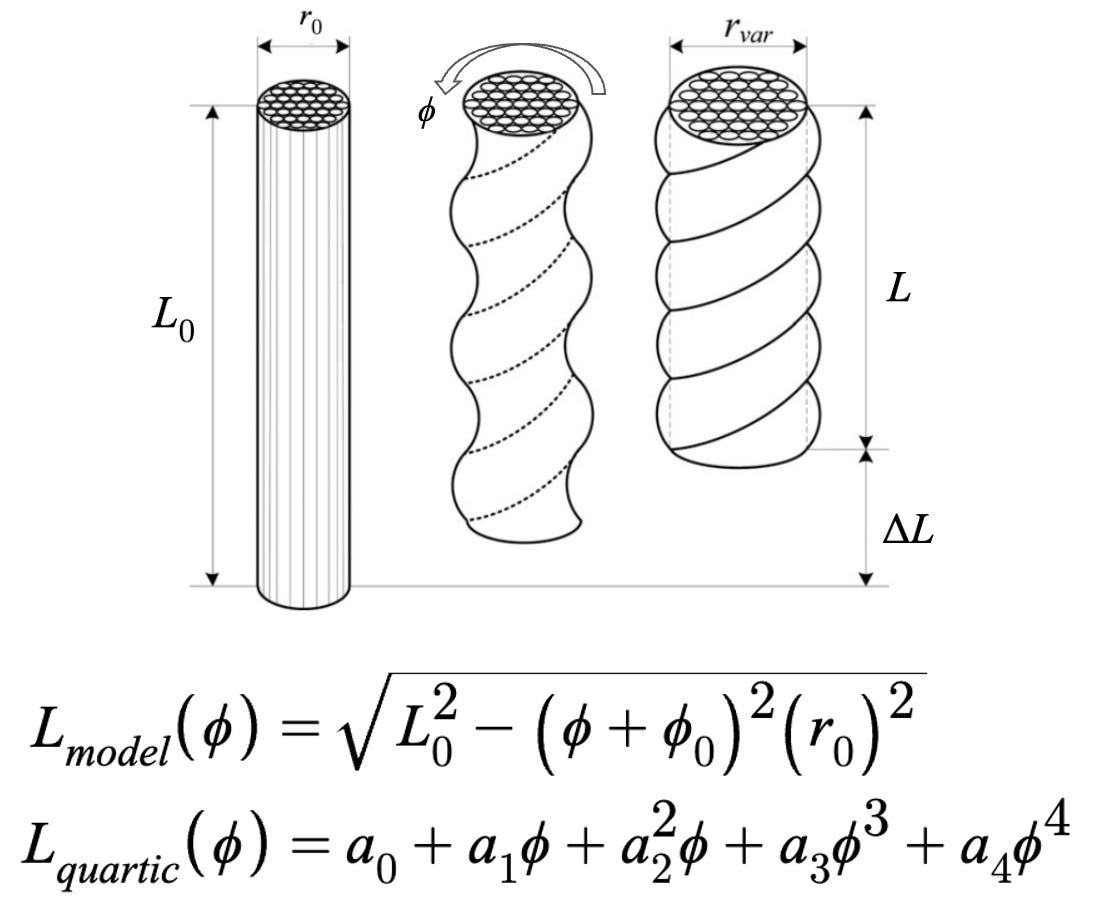
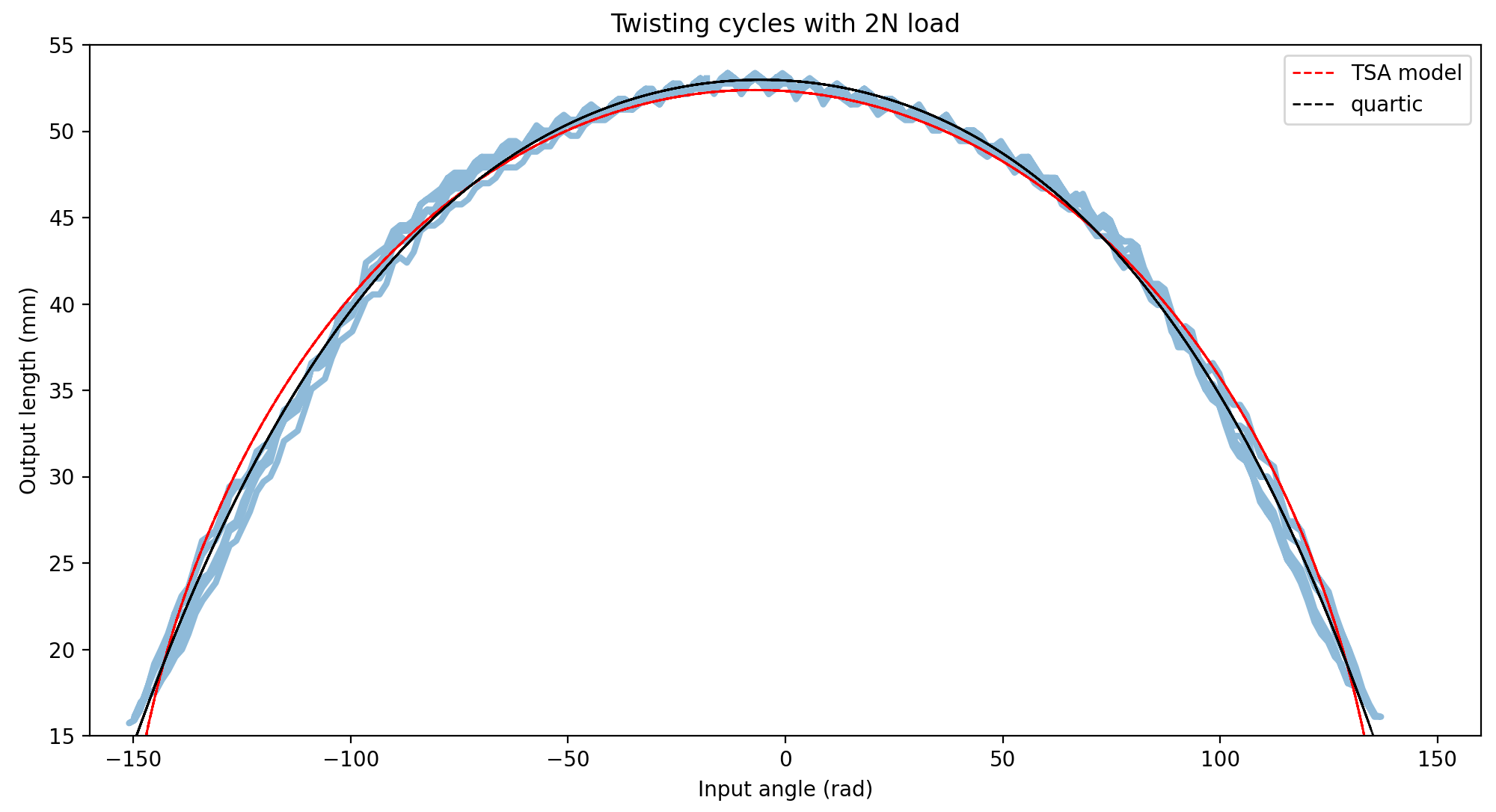
Both functions were able to capture the overall shape, but the quartic polynomial fitted better possibly because it has a bit more flexibility. A φ0 term was added to the model to compensate for any twist in the string at the start of the experiment, evident from the different ending angles (-150 to +140 radians). The fitted model gave reasonable estimates of the string dimensions: 0.36mm in radius and 52mm long.
Anyway, we are happy with the experiment and can easily test different strings because most of the process is automated. We’ll use the quartic polynomial to derive the mechanical advantage profile for use in linkage optimization because it fits well and the function is easily differentiable.
Next time, we aim to reach higher heights (and stay there) with even more prototypes. Thanks for following the project and make sure to check back in two weeks!
To the canopy,
Pinto
Models and experiments to show that adding a spring in series with a DC motor changes its operating point and stiffness can be tuned to increase power output.
Robotic vertical jumping agility via series-elastic power modulation
Design of Salto, a one-legged jumping robot inspired by the power modulation of the galago, a small primate with one of the best jumping abilities.
Design of a Bio-inspired Dynamical vertical climbing robot
Explores the dynamics of climbing animals and builds a wall-climbing robot to use these principles inspired by biology. Our climbing prototype is very similar with its four-bar limbs that move roughly on a line about 10º from the vertical.
Models and experiments of a twisted string actuator. Our experiment is heavily inspired by theirs, and our data can be well explained with their model.
The tree grip attempts are unbelievable!!! Great progress. To the canopy and beyond!