
Pintobotics debut
Let's build a squirrel!




Welcome to the Pintobotics newsletter! We are two students at the University of Illinois Urbana-Champaign trying to build the most realistic robotic squirrel possible. If you are receiving this as an email, we thought you might be interested in learning more about the project. There’s a 6-minute video introduction, but here’s the general idea: squirrels are some of the most physically agile beings around us, and we want to replicate those abilities with a machine. Squirrels are extremely adaptable in ways that haven’t been seen yet in robotics—rapid running, jumping, and climbing all with the same set of hardware—and their size is small enough for college students to develop in our own apartments. Bits of the project have been in progress for almost two years, but now we finally feel ready to put it all together and commit.
We’ll have written updates here on Substack every two weeks, which include the most recent progress, our learnings from them, and plans for the following two weeks. There will be pictures and videos, definitely. Please let us know if there aren’t enough pictures and videos. Or, you can visit the Pintobotics youtube channel, which will have clips of progress as soon as they happen.
Why are we called Pintobotics?
In 2022, one eastern gray squirrel on the UIUC campus became known as Pinto Bean, due to a unique pattern of unpigmented white fur on his gray body. Students would post encounters with Pinto Bean online, and he became a local celebrity. Unfortunately, Pinto Bean was killed by a vehicle on October 8th, 2022. He was delivered to a taxidermist and is now on display in the Natural History building.

Pinto Bean lives on in the students’ hearts. Our name, short for “Pinto robotics”, is in commemoration of this special squirrel.
Inspirations
Pintobotics is greatly influenced by the Salto-1P robot and the Mini Cheetah. Salto’s success with extremely dynamic jumping motions and the Mini Cheetah’s usage of cheap drone motors to create high-quality robotic actuators lets us believe that a fast robotic squirrel is actually possible. Chris was so enamored by Salto in freshman year that he tried to build one:
Progress and Plans
Mechanical
The focus is on the hindlimb design because it delivers most of the energy during a squirrels’s jump. Our plan uses a bevel gear differential system that extends the leg when two motors spin in opposite directions, and rotates the leg around the hip when the same two motors spin in the same direction. This lets us have more jumping power for the same mass because both motors will be fully utilized during leg extension or leg rotation.

Currently, the center of gravity of the leg assembly is a bit high, making it less stable and harder to package into a natural squirrel shape later. In the next iteration, we’ll shift the position of the motors and bevel gears towards the front of the leg and analyze the effects of having a more forward hip rotation point.
Electrical
The Ø32 controller works! Ø32 is a custom brushless motor controller specifically designed for the squirrel, and aims to be one of the most compact for its power output. The main actuators on the squirrel will use brushless DC drone motors for their high power density, but that would be useless if the electronics required make the system just as heavy if it were to use hobby servos or DC motors.
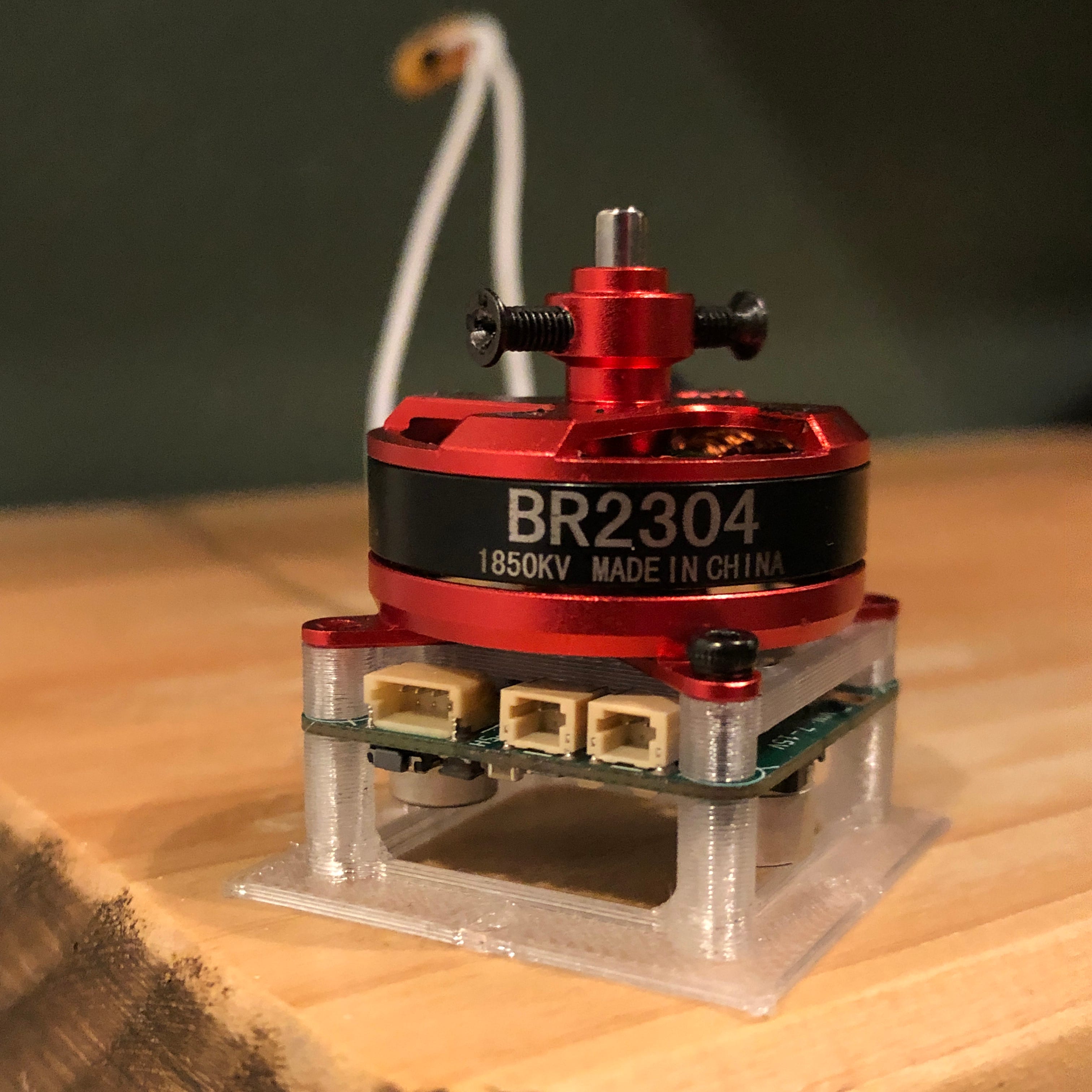
Just a few days ago, Ø32 spun its first motor in open-loop, meaning that the stationary coils turn on in a certain sequence to generate a rotating magnetic field, then we hope the magnets follow the field and pull the rotor to rotate with it. The next step is to use the position sensor on the board to more optimally commutate the motor: generate the magnetic field always aligned 90º to the poles of the permanent magnets to get maximum torque.
Funding
Thank you to 1517 Fund for sponsoring this project with the Medici grant! The money will be spent towards hardware for leg prototypes, future iterations of the motor electronics, and various tools to test each system.
Closing thoughts
It’s going to be a long journey. Building a robot as agile as a squirrel has some serious challenges, but amazing returns from all the skills we’re building along the way. So far, this multifaceted project helped us learn how to seek help from experts, present an idea, perform literature reviews, in addition to technical concepts such as numerical optimization, biomechanics, control systems, and power electronics. Each post here on Substack will attempt to share what we’ve learned, so subscribe for email updates if you’re interested!
—Chris and Jack
 | A guest post by
|
 | A guest post by
|
Pintobotics!! Excited for more updates
Let’s go!!!