


#11 Deadline sprint
Full squirrel demo, 2 DOF latched series elastic, applications

It’s nearing the end of the semester, and what a unique 16 weeks it’s been! New challenges keep on popping up, and nothing generates new unexpected challenges like deadlines.
Demo
The Pintobotics project is one fueled by an intrinsic passion to design and build a cool jumping robot. However, it is still helpful sometimes to have external motivation to produce a result, or else we’ll tend to spend too long trying to find the theoretically perfect design that only exists in our head or partially in CAD. Hard deadlines force us to make something physical and presentable, and also to reassure everyone that we didn’t just spend a semester slacking off.
The past two weeks were focused on preparing for a demo on Wednesday, December 6. Professor Leon Liebenberg kindly invited us to present our progress at his class ENG 471 (Seminar Energy & Sustain Engrg). Thank you to Aaryaman for the recording:
Pinto 1

This robot, Pinto 1, is the first full body squirrel of the project. It has 4 independent limbs each with 2 degrees of freedom: hobby servos power the arm roll, arm extension/retraction, and leg pitch, while a brushless motor powers each hind leg extension.

In the demo, our robot is able to hang on the tree with sharp fishhooks at each fingertip, on both the front and rear limbs. We use the same flexure developed earlier to keep the claw aligned, and added a round piece of latex as the foot pad for gripping onto smooth surfaces.


Unfortunately, Pinto 1 isn’t able to actively climb the cat scratch post because the hobby servo motors we used for the arm extension do not generate enough force, and it does not walk or bound forward smoothly because the geometry of the arms aren’t well suited for pushing off the ground. However, it is enough to demonstrate the feasibility of latching onto a tree using fishhooks and generating enough instantaneous power with the hind legs.
We’ll likely switch to Dynamixel servos or twisted string actuator (like the hind legs) for the arms.
Squirrel brain and 8-axis joystick
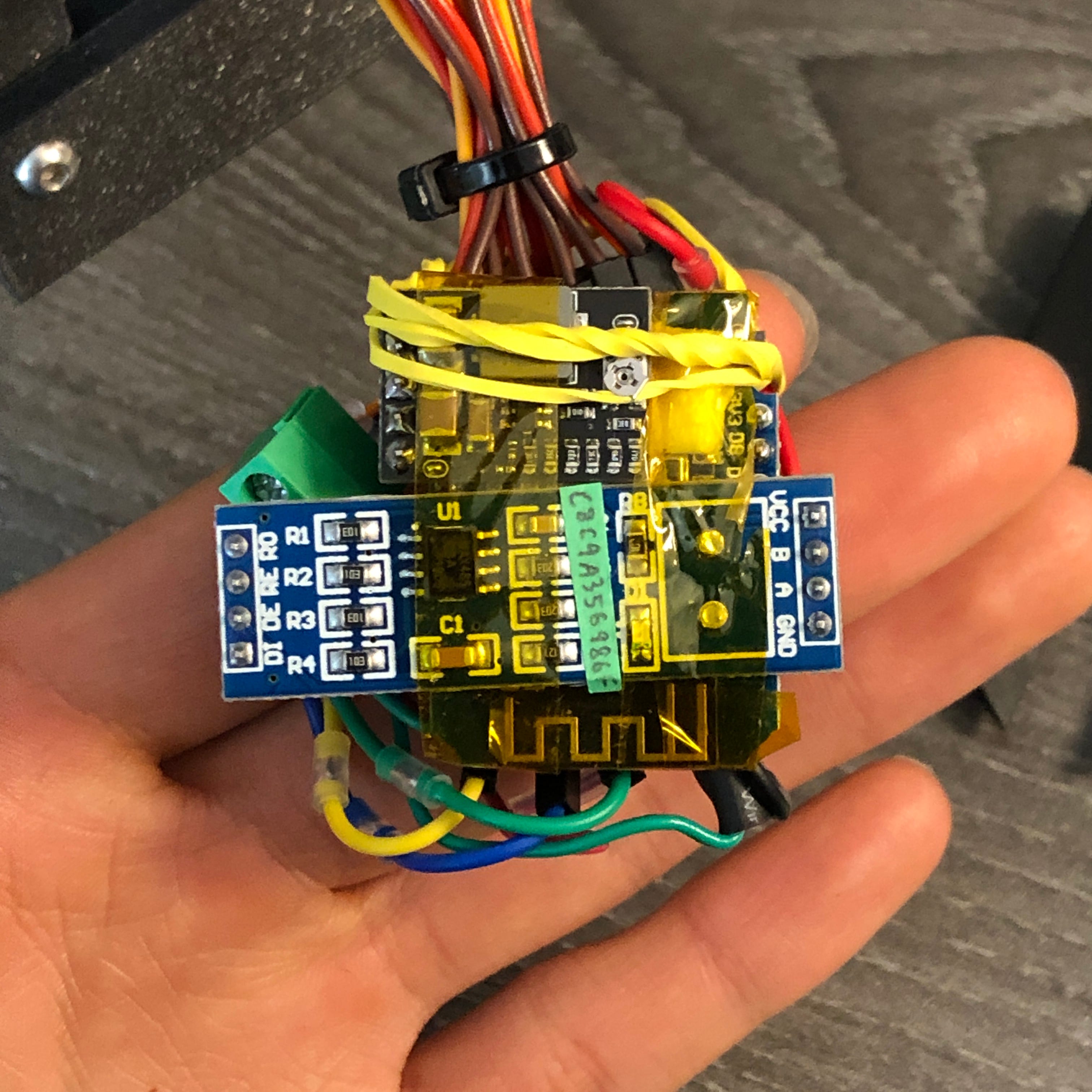
To remote control the servos and brushless motors on the squirrel, we have a DC-DC converter to step down the 3S battery (11-12V) to 5V that is used by a ESP8266 dev board and RS485 transceiver. These three boards are connected with jumper wires and taped together for now, but eventually will be turned into a compact dedicated PCB. The ESP8266 generates 6 PWM signals for the servos, and sends serial data to the RS485 transceiver to communicate with the Ø32 BLDC controllers.
(In hindsight, we should have had something to keep track of the battery voltage. We ended up damaging one pack by discharging it too much.)
For the joystick controller, we took 4 gamepad thumbsticks and mounted them to carbon fiber rods along with a Teensy 4.0 and ESP8266 dev board. The Teensy reads the analog X and Y axis values of each thumbstick and sends the data over to ESP8266 over UART serial. The ESP8266 then transmits the data over the wifi protocol ESP-NOW, which the ESP8266 on the squirrel receives and acts accordingly.

Having 4 independent thumbsticks allows us to use a direct mapping between the 8 thumbstick axes and 8 joint values on the squirrel. Each thumbstick represents a limb. For example, moving my left thumb forward on the upper left of the image would extend Pinto’s left arm.
This is a rough first attempt at teleoperation interface inspired by puppet control. Instead of having a single thumbstick that commands the high-level task of walking forward, for example, one interesting direction worth exploring is giving the human operator control over many degrees of freedom so a much larger variety of motions are available. This control scheme makes it much harder for the human operator, but with practice this will make it possible to demonstrate abilities in unconventional terrain without advanced automatic control techniques (for example, guitar fingering may feel unintuitive at first but people can get very skilled with practice). The challenge is creating an human interface device that captures degrees of freedom that the human can move independently and at a similar speed to the robot squirrel. In the current joystick, we utilize the dexterity of the thumb and index fingers, but there is some coupling between the two degrees of freedom of each finger—it’s much more natural to move each finger in certain directions than others.
2 DOF latched series elastic leg

To jump higher off the ground, we have developed in parallel a leg that uses series elasticity to store energy before a jump based on principles in this technical post. Two series elastic actuators are linked together in a 5-bar linkage so that the leg can extend when both springs are released while also being able to pitch forward and backwards using the difference in position of the two springs.
When both springs are released at the same time, the leg follows a trajectory on a backwards diagonal relative to the rest of the squirrel’s body.

There is a latch for each spring such that when the spring is compressed enough, the spring is suddenly released. This effectively accomplishes the dramatic drop in transmission ratio for series elastic power modulation described in the technical post mentioned earlier.

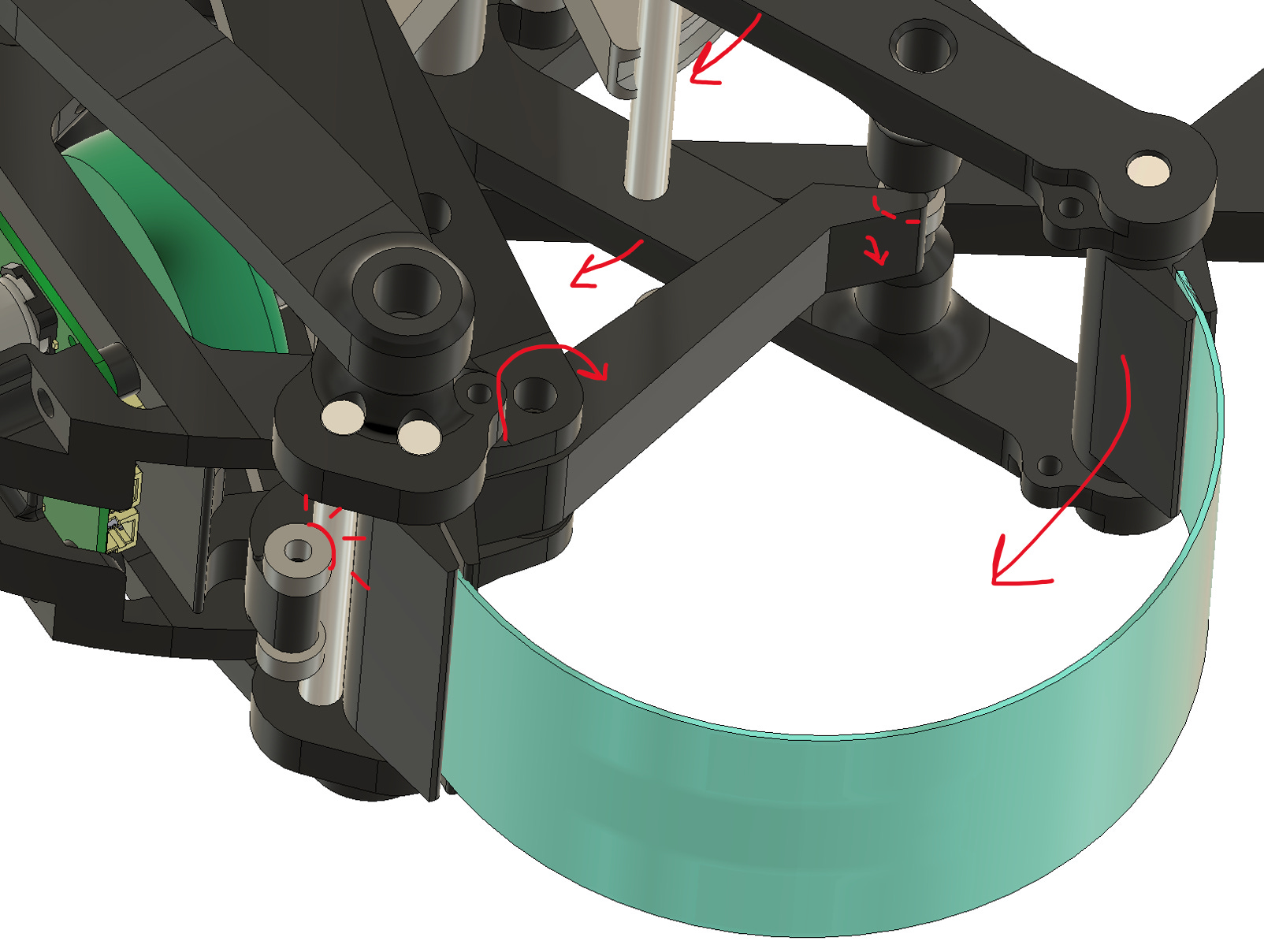
During walking gait, the springs are unlatched. The motors have direct control of the input links sketched in blue, which are connected using compression springs to L1 and L2. By rotating L1 and L2 clockwise, the foot moves backwards to propel the body forward.
To prepare for a jump, the blue input links both move up towards the body, pulling L1 and L2 with it. The foot gets drawn closer to the body, making the robot crouch. Once the input links rotate past a certain position, L1 and L2 are latched in place and cannot move back down.
To wind up the jump, the motors pull the blue input links towards L1 and L2, compressing the springs. The foot does not move because L1 and L2 are latched.
Once the blue input links rotate sufficiently downwards, the latch releases. The spring is allowed to expand, releasing the stored energy for the jump to accelerate the foot down and to the left.
With all the springs loaded, this new leg can store about 5J of elastic energy, a goal we set last time. Pinto 1 weighs 405g, so theoretically this leg can launch it over 1.2 m into the air. Realistically, probably half of the energy will be lost, so we can expect a jump around 0.6 m high. Enough to clear the roots and reach the trunk of a tree!
Possible applications
In the process of presenting Pinto 1 to a broader audience, we also came up with two possible applications of the agile legged robot we aim to build.
Pipeline maintenance
“Geothermal energy development in Indonesia […] is likely to take place in the country’s remaining important forest areas; up to 42 percent of potential geothermal resources or more than 12 GW are located in protected forest areas”
WWF Report: A Vision for Developing Indonesia’s Geothermal Power

To harness geothermal power in Indonesia, large areas of forest must be cleared to allow for pipeline construction and accessibility. Can we reduce the ecological impact by reducing the area cleared for accessibility and performing maintenance with small robots? A robotic squirrel would be able to navigate the complex terrain to inspect and trim the vegetation around the pipeline, without the large clearances required for humans or drones.
Wildlife observation
“[Researchers] started a page on iNaturalist where community scientists could post photos of birds, other insects, and spiders eating the spotted lanternfly. The page currently has 78 observations of 33 different species chowing down […] they contributed to a broader research initiative to examine if and how spotted lanternflies could be controlled by predation.”

The spotted lanternfly is an invasive species in North America that endangers important crops. Researchers currently use crowdsourced data from from birders to identify which animals can control the lanternfly population, but data may be sparse and hard to confirm. What if we use robot squirrels, which are less intrusive than humans, to observe instead?
Thanks for following along! We will be on winter break soon, so will not have access to much of the same prototyping tools in the next month. However, we hope to get more electronics and firmware development done!
Brooo you had two substacks all along?? Dang I was wondering where all the squirrel posts were. Wow you really cooked holy cow.
Brooo you had two substacks all along?? Dang I was wondering where all the squirrel posts were. Wow you really cooked holy cow.